Partie 10 - Comprendre les mécanismes de protection du BO - les canaris
Comprendre les mécanismes de protection du stack buffer overflow : les canaris 🐤
Les développeurs de Linux et de la libc ne se sont pas rendus compte de toutes les attaques possibles pour exploiter les dépassements de mémoire sur la pile ?
Le domaine de la recherche de vulnérabilité est une éternelle course du chat et de la souris : pendant que certains élaborent des attaques de plus en plus sophistiquées, d’autres mettent en place des protections de plus en plus robustes.
C’est pourquoi, plus on avancera dans ce cours, plus les méthodes d’exploitation vont devenir de plus en plus complexes. Ne vous inquiétez pas : si vous retenez progressivement les différentes méthodes d’exploitation et le fonctionnement des protections, vous ne devriez pas avoir de souci pour progresser en pwn.
Le principe
Les canaris (ou stack cookies / stack canaries 🇬🇧) sont une protection relativement simple à comprendre. Elle répond à la problématique suivante : comment détecter qu’un dépassement de mémoire sur la pile a eu lieu ?
Vous vous demandez peut-être l’origine du nom “canari”. Historiquement, les mineurs emmenaient des canaris dans les mines pour détecter les gaz toxiques. Les canaris sont très sensibles aux variations d’air respirable, et leur détresse ou mort précoce avertissait les mineurs d’un danger imminent.
De la même manière, les canaris dans un programme signalent la présence d’un dépassement de tampon.
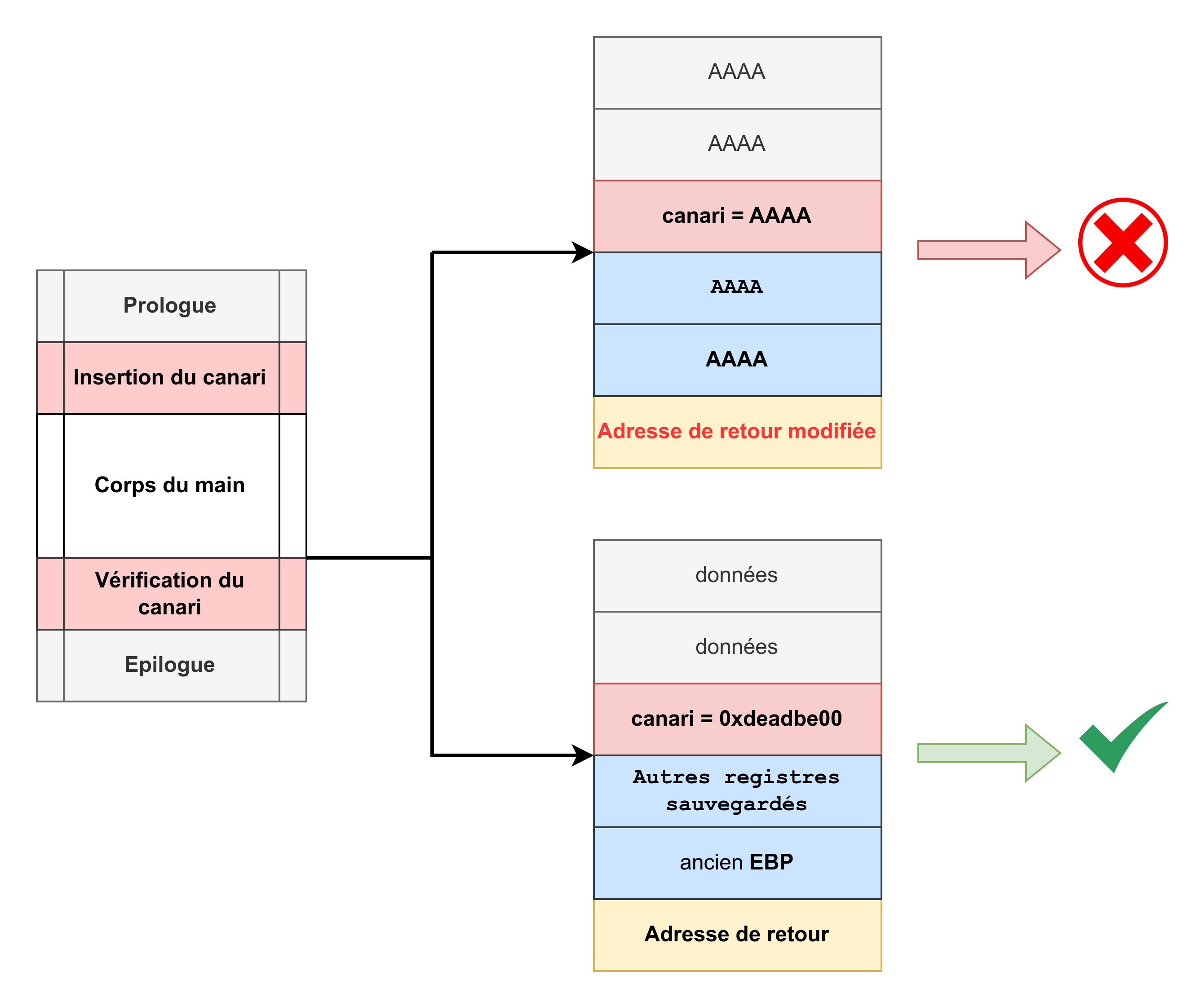
L’idée globale est d’insérer sur la pile, juste avant l’adresse de retour et les registres sauvegardés, une valeur connue à l’avance (par le programme) lorsque l’on exécute la fonction. En fin de fonction, on vérifie si :
- cette valeur est toujours la même ➡️ il n’y a a priori pas eu de dépassement de mémoire ✅ ;
- cette valeur a été modifiée ➡️ il y a eu un buffer overflow, le programme est arrêté ❌.
L’objectif n’est pas d’empêcher le buffer overflow, mais de détecter son exploitation avant qu’elle ne puisse détourner le flux d’exécution.
Si cela paraît encore un peu flou, je vous propose de voir ensemble ce qui se passe sur la pile au fur et à mesure que l’on avance dans l’exécution de main d’un programme quelconque. Tout d’abord, en entrant dans le main la valeur en tête de pile est l’adresse de retour, jusque-là je ne vous apprends rien :
Lorsque le prologue est exécuté, différents registres sont sauvegardés. Idem, rien de nouveau ici :
 Ensuite, le canari, qui n’est rien d’autre qu’une valeur aléatoire de 32 bits (ou 64 en
Ensuite, le canari, qui n’est rien d’autre qu’une valeur aléatoire de 32 bits (ou 64 en x86_64), est généré et inséré en tête de pile :
L’octet de poids faible du canari est toujours
0x00. Nous verrons ultérieurement la cause de sa présence.
À partir de là, la fonction main poursuit son exécution en faisant totalement abstraction du canari jusqu’à arriver à la fin de son exécution, juste avant l’épilogue. Une vérification du canari a été ajoutée par le compilateur et là, deux scénarios sont possibles :
- un dépassement de mémoire tampon a eu lieu. Le canari a été écrasé et sa valeur a donc été modifiée. Cela sera détecté et le programme sera arrêté avec un message du type
*** stack smashing detected ***: terminated. ❌ ; - tout s’est bien passé et le canari a gardé sa valeur de départ ✅ ;
Si la valeur du canari est modifiée, comment le programme peut s’en rendre compte vu qu’il ne l’a sauvegardée nulle part 🤨 ?
Très bonne question ! Voyons de plus près comment cela est concrètement implémenté afin de trouver une réponse à cette question.
Les détails de l’implémentation
Le programme utilisé est toujours le même :
1
2
3
4
5
6
7
8
9
#include "stdio.h"
int main()
{
char prenom[256] = {0};
gets(&prenom);
printf("Bonjour %s !\n",prenom);
return 0;
}
Pour le compiler : clang -m32 -no-pie -fstack-protector main.c -o canaris -Wno-implicit-function-declaration.
L’accès au conteneur Docker de ce chapitre est le suivant :
- ⬇️ Téléchargement : pwn-stack-canaris.zip
- 🔎 SHA256 & Analyse Virus Total : 2822153a0d31eebf3b01e1d4b44aa4a635bed3c6639b4c01ef60d76a5a7ac231
- ⚙️ Construction et lancement du conteneur :
1
2
docker build -t pwn-stack-canaris .
docker run -it --rm --cap-add=SYS_PTRACE --security-opt seccomp=unconfined pwn-stack-canaris
Nous voyons que la protection est bien présente via checksec :
1
2
3
4
5
6
7
$ pwn checksec canaris
[*] '/opt/chal/canaris'
Arch: i386-32-little
RELRO: Partial RELRO
Stack: Canary found <-----
NX: NX enabled
PIE: No PIE (0x8048000)
Vous l’avez deviné, c’est l’option -fstack-protector qui indique au compilateur d’utiliser les canaris. Jetons un œil au code assembleur du programme afin de comprendre comment se passe l’insertion et la vérification du canari :
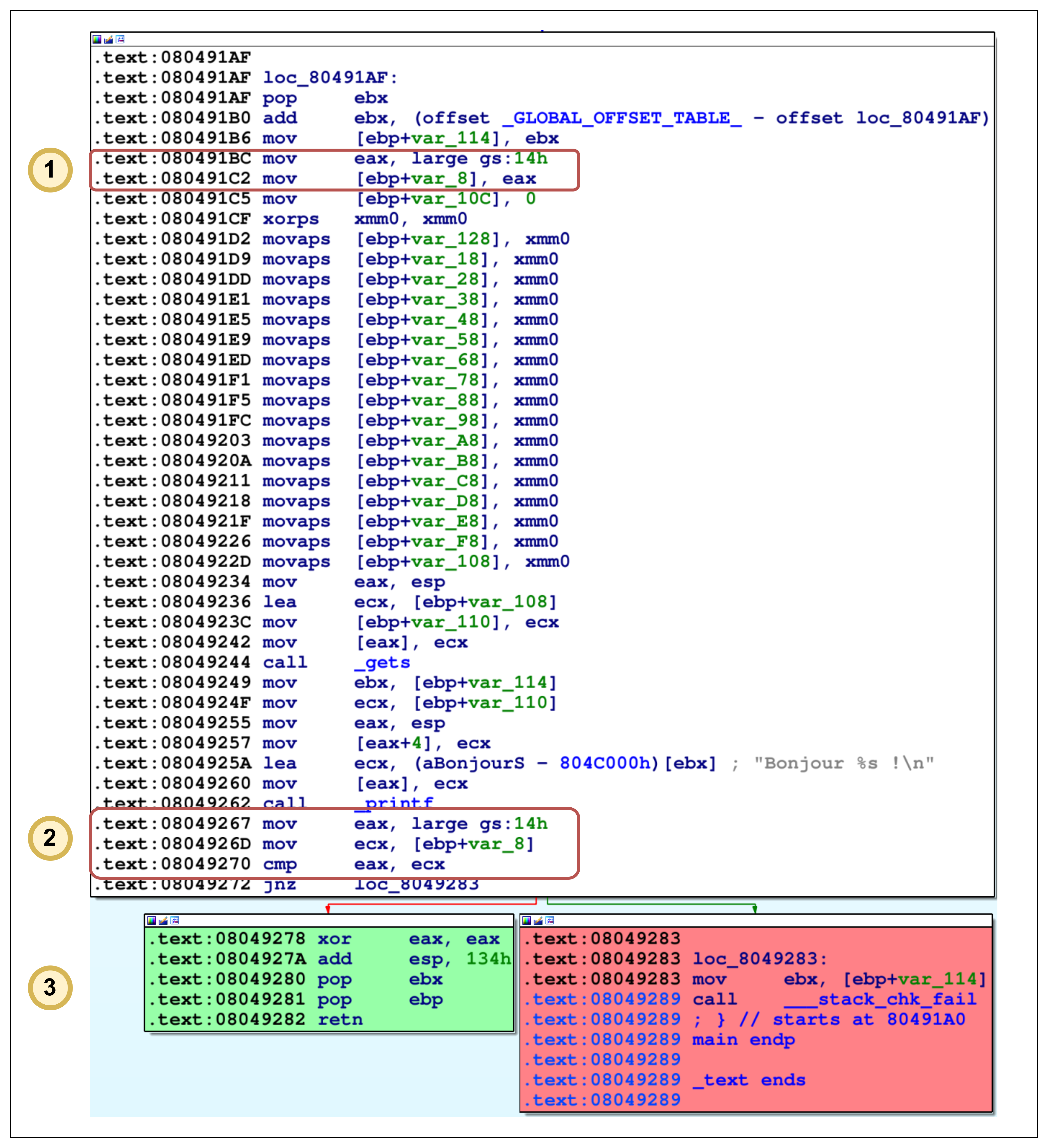
- la valeur du canari est récupérée dans
eaxà partir de l’offset0x14du registregs. Nous verrons ce à quoi correspond ce registre. Le contenu deeaxest mis sur la pile (viaebp) ; - avant de quitter la fonction, la valeur du canari est récupérée dans
eaxdepuisgs(valeur initiale) ainsi que dansecx(valeur potentiellement modifiée). Ces deux registres sont ensuite comparés viacmp(parfois cela est fait via unxordont le résultat doit être nul) ; - deux cas sont envisagés :
- le canari n’a pas été modifié : on entre dans le bloc 🟢 et le programme termine normalement ;
- le canari a été modifié : on entre dans le bloc 🔴 et le programme termine prématurément via un appel à
__stack_chk_fail.
🐥 Où es-tu caché ?
Nous allons détailler davantage l’implémentation du canari en mémoire. Cela implique des notions (et du vocabulaire) qu’il n’est pas nécessaire d’assimiler pour comprendre comment fonctionne un canari. Si vous avez du mal avec cette partie, passez à la suivante tant que vous avez retenu ce qui a été dit précédemment sur le fonctionnement du canari.
Pour les plus curieux et plus à l’aise avec le pwn, cette partie est tout de même intéressante car elle ouvre des perspectives d’exploitation permettant de modifier la valeur initiale du canari en mémoire 🫣.
La question que vous vous posez sans doute : où est exactement stocké le canari ? Plus précisément : vers quoi pointe le registre de segment gs ?
Si vous tentez d’afficher la valeur de $gs dans gdb vous risquez de tomber sur une valeur du type 0x63 qui est un index dans la GDT (Global Descriptor Table ).
En réalité, un registre de segment peut pointer dans la GDT ou la LDT (Local Descriptor Table).
Lorsque le bit n°2 du registre est nul, c’est GDT qui est utilisée, sinon, c’est la LDT. En l’occurrence, comme la valeur de
gsest0x63, c’est GDT qui est utilisée.
Concrètement, cela permet, à partir d’un index, de récupérer une adresse. En l’occurrence, il s’agit d’une adresse vers une structure pthread qui est dans le TLS (Thread Local Storage) : une zone mémoire permettant de gérer les threads d’un programme ainsi que les variables “thread-safe”. C’est, entre autres, ce mécanisme qui permet à chaque fil d’exécution d’avoir ses propres variables.
Pour revenir aux canaris, cela implique que chaque fil d’exécution a son propre canari.
Le premier membre de la structure pthread est une structure tcbhead_t qui est l’en-tête du TCB (Thread Control Block). Oui je sais, ça fait pas mal d’acronymes, n’hésitez pas à prendre le temps de les comprendre 😅. Grosso modo, le TCB est une structure contenue dans le TLS.
Voyons de plus près les différents membres de tcbhead_t :
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
typedef struct
{
void *tcb; /* Pointer to the TCB. */
dtv_t *dtv;
void *self; /* Pointer to the thread descriptor. */
int multiple_threads;
int gscope_flag;
uintptr_t sysinfo;
uintptr_t stack_guard; // 🐥
uintptr_t pointer_guard;
unsigned long int unused_vgetcpu_cache[2];
unsigned int feature_1;
int __glibc_unused1;
void *__private_tm[4];
void *__private_ss;
unsigned long long int ssp_base;
__128bits __glibc_unused2[8][4] __attribute__ ((aligned (32)));
void *__padding[8];
} tcbhead_t;
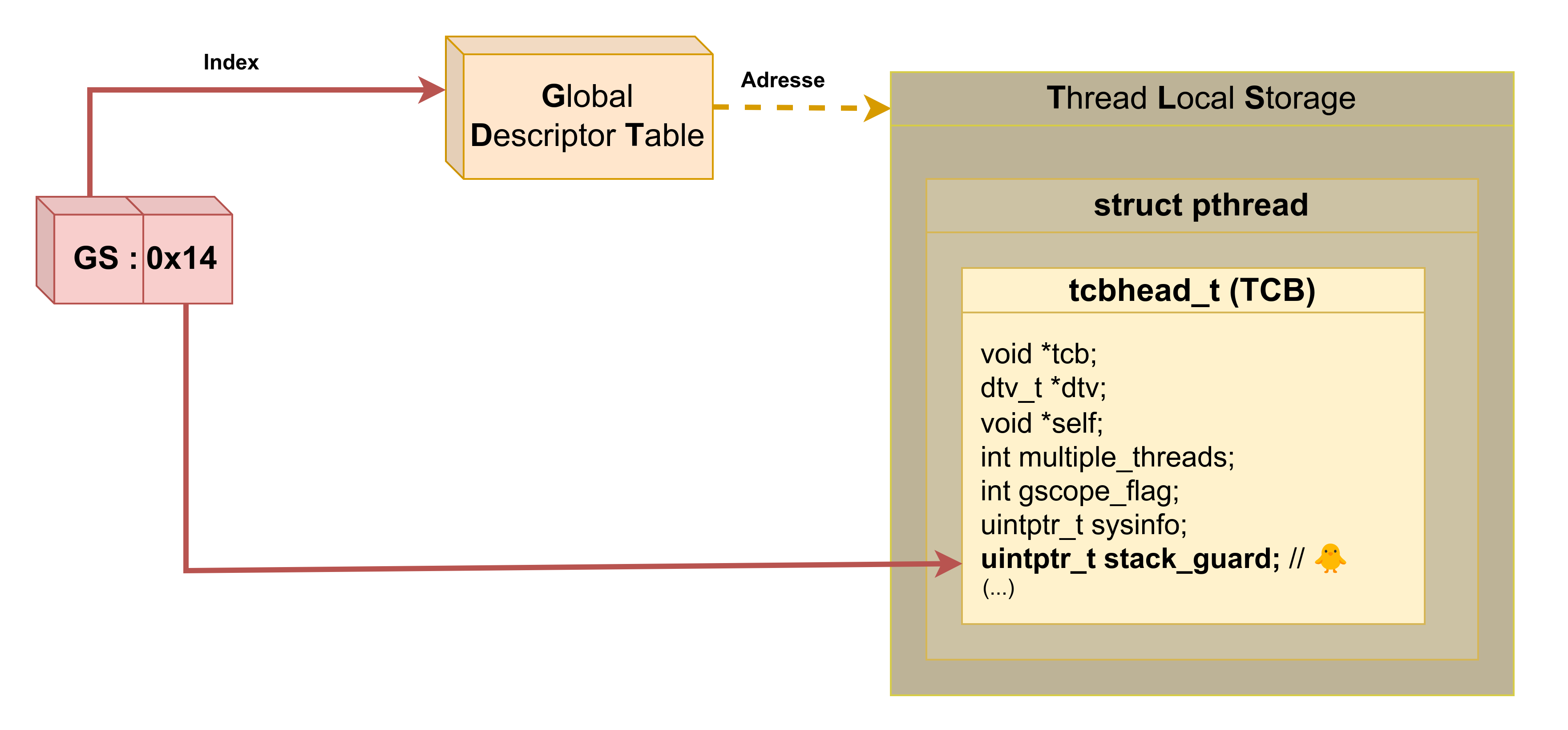
Le 7ème membre est nommé stack_guard. Sachant que chacun des 7 premiers membres est sur 4 octets (car nous sommes en 32 bits), l’offset de stack_guard est 0x14, on retombe bien sur ce que l’on a vu plus haut avec mov eax, gs:14h !
Ainsi, stack_guard est bien le membre où est stocké le canari 🐥 !
Ici
uintptr_tpouruintptr_t stack_guard;ne signifie pas que ce membre contient un pointeur : il contient directement la valeur du canari.
Voici un schéma qui résume ce qui se passe lorsque l’on souhaite récupérer la valeur qui est pointée par gs:0x14 :
C’est bien beau tout ça, mais ça c’était la théorie, maintenant comment trouver où est l’en-tête tcbhead_t ?
Dans gdb il est possible d’utiliser cette commande pour avoir quelques informations sur les threads du processus courant:
1
2
3
pwndbg> info threads
Id Target Id Frame
* 1 Thread 0xf7fbf500 (LWP 412671) "canaris" 0x080491c2 in main ()
Utilisons ensuite l’adresse retournée avec la commande suivante :
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
pwndbg> p/x *(tcbhead_t *) 0xf7fbf500
$4 = {
tcb = 0xf7fbf500,
dtv = 0xf7fbfa88,
self = 0xf7fbf500,
multiple_threads = 0x0,
sysinfo = 0xf7fc4570,
stack_guard = 0x4210ea00, <------- 🐥
pointer_guard = 0x91b5254,
gscope_flag = 0x0,
feature_1 = 0x0,
__private_tm = {0x0, 0x0, 0x0},
__private_ss = 0x0,
ssp_base = 0x0
}
Plus rapide : nous pouvons tout simplement utiliser la commande tls -a :
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
pwndbg> tls -a
Thread Local Storage (TLS) base: 0xf7fbf500
TLS is located at:
0xf7fbe000 0xf7fc0000 rw-p 2000 0 [anon_f7fbe]
Dumping the address:
tcbhead_t @ 0xf7fbf500
0x00000000f7fbf500 +0x0000 tcb : 0xf7fbf500
0x00000000f7fbf500 +0x0004 dtv : 0xf7fbfa88
0x00000000f7fbf500 +0x0008 self : 0xf7fbf500
0x00000000f7fbf500 +0x000c multiple_threads : 0x0
0x00000000f7fbf500 +0x0010 sysinfo : 0xf7fc4570
0x00000000f7fbf500 +0x0014 stack_guard : 0x4210ea00
0x00000000f7fbf500 +0x0018 pointer_guard : 0x91b5254
0x00000000f7fbf500 +0x001c gscope_flag : 0x0
0x00000000f7fbf500 +0x0020 feature_1 : 0x0
0x00000000f7fbf500 +0x0024 __private_tm : {0x0, 0x0, 0x0}
0x00000000f7fbf500 +0x0030 __private_ss : 0x0
0x00000000f7fbf500 +0x0034 ssp_base : 0x0
Il peut être nécessaire d’installer
libc6-dbg:i386etlibc6-dbgpour que la commandetlsfonctionne correctement.
Nous avons réussi à trouver la valeur du canari en mémoire ! D’ailleurs, à partir de l’adresse de tcbhead_t nous savons désormais à peu près où est stocké le TLS :
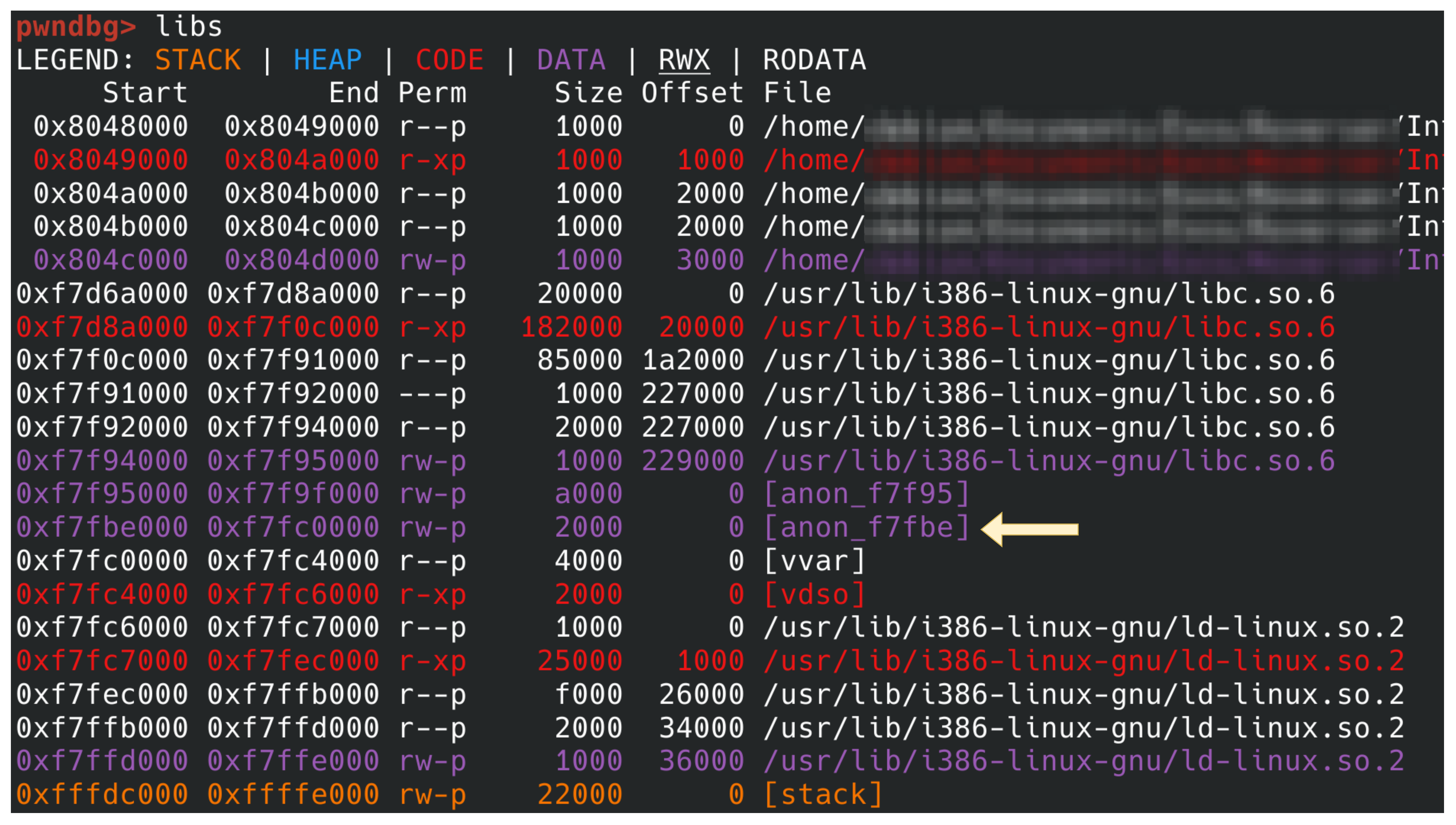
En fonction de la version de la libc, il est possible que cette zone mémoire soit mappée avant la zone mémoire utilisée par la libc.
Pour les programmes x86_64, le même principe est utilisé sauf qu’au lieu d’utiliser
gs:0x14, c’estfs:0x28qui est utilisé.
On en déduit également un point important : si la vérification du canari est implémentée dans plusieurs fonctions, cela n’implique pas d’avoir un canari par fonction. Ces fonctions utiliseront le même canari, celui qui est dans le TLS.
✏️ Changer la valeur du canari
Nous ne sommes pas allés aussi loin dans les détails pour rien 😏. Vous remarquerez que la zone mémoire contenant la structure tcbhead_t dispose évidemment du droit de lecture r, mais également du droit d’écriture w !
Ainsi, si nous disposons d’une primitive d’écriture arbitraire, il est en théorie possible de réécrire la valeur du canari avec une valeur arbitraire que nous pourrons réutiliser dans notre payload afin d’éviter que le programme détecte un buffer overflow.
En pratique, le TCB est situé à une adresse soit fixe ou presque fixe, par rapport à la libc, qu’il est possible de trouver par force brute si besoin.
📋 Synthèse
Le principe des canaris est simple : une valeur aléatoire est insérée sur la pile, juste avant l’adresse de retour. À la fin de l’exécution de la fonction, cette valeur est vérifiée :
- si inchangée : pas d’anomalie détectée, le programme continue ✅ ;
- si modifiée : un dépassement de tampon est suspecté, et le programme est arrêté immédiatement ❌.
La valeur initiale du canari est stockée en mémoire dans le TCB qui contient des informations du fil d’exécution courant. Il est possible de modifier cette valeur sous certaines conditions.