Partie 1 - Introduction
Au nom de Dieu, le Tout Miséricordieux, le Très Miséricordieux.
Introduction 💭
angr est un moteur d’exécution symbolique open source qui permet d’analyser et d’émuler des programmes binaires. Il utilise l’exécution symbolique pour explorer toutes les branches d’exécution possibles d’un programme. Il permet, entre autres, de découvrir les vulnérabilités, les bugs et conditions qui permettent d’atteindre certaines parties d’un programme.
L’un des principaux avantages d’angr est sa capacité à analyser les programmes sans avoir besoin de les exécuter réellement. Cela permet d’éviter les problèmes de sécurité (exemple : malware) et d’analyser plus facilement un bout de code sans avoir à l’exécuter.
angr est utilisé dans de nombreux domaines de la sécurité informatique, tels que la recherche de bugs, l’analyse de malware, la sécurité des systèmes embarqués et dans les challenges !
Il est compatible avec de nombreuses architectures de processeurs et prend en charge de nombreux formats de fichiers binaires.
Ah oui au fait, en termes de prononciation 🤓:

Les différents types d’analyse
Avant de nous intéresser directement à l’exécution symbolique, voyons d’abord quelles sont les deux principales méthodes utilisées pour analyser un programme.
Le programme utilisé en guise d’exemple est le suivant :
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
#include <stdlib.h>
int main(int argc, char *argv[])
{
int arg = atoi(argv[1]);
if (arg == 0xdeadbeef)
{
return 1337;
}
else
{
return -1;
}
}
L’analyse statique
Ce type d’analyse est qualifié de “statique” car il ne nécessite pas l’exécution du programme. Généralement, on se sert d’outils qui permettent d’extraire des informations d’un programme et de le comprendre.
On peut se servir d’un désassembleur afin de convertir des données brutes d’octets en instructions assembleur, exemple : objdump, radare2, capstone.
Exemple du précédent code désassemblé (après compilation) :
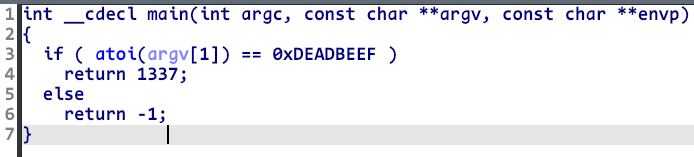
On se sert également de décompilateurs afin d’avoir des informations supplémentaires, telles que du code, plus facilement lisible pour un humain. On peut citer, par exemple : Ida Pro, Ghidra, Binary Ninja, Cutter …
Exemple du précédent code décompilé :
En utilisant ces divers outils il est, souvent, déjà possible de comprendre ce que fait un programme, comment sont appelées ses diverses fonctions et comment elle interagissent entre elles.
L’analyse dynamique
Contrairement à l’analyse statique, l’analyse dynamique nécessite l’exécution du programme. Cette exécution peut être réalisée sur une machine physique, un émulateur (Qemu par exemple), une machine virtuelle …
Divers outils, appelés debuggers, permettant de réaliser une analyse dynamique en exécutant pas à pas un programme. Par exemple : GDB, windbg, x64dbg …
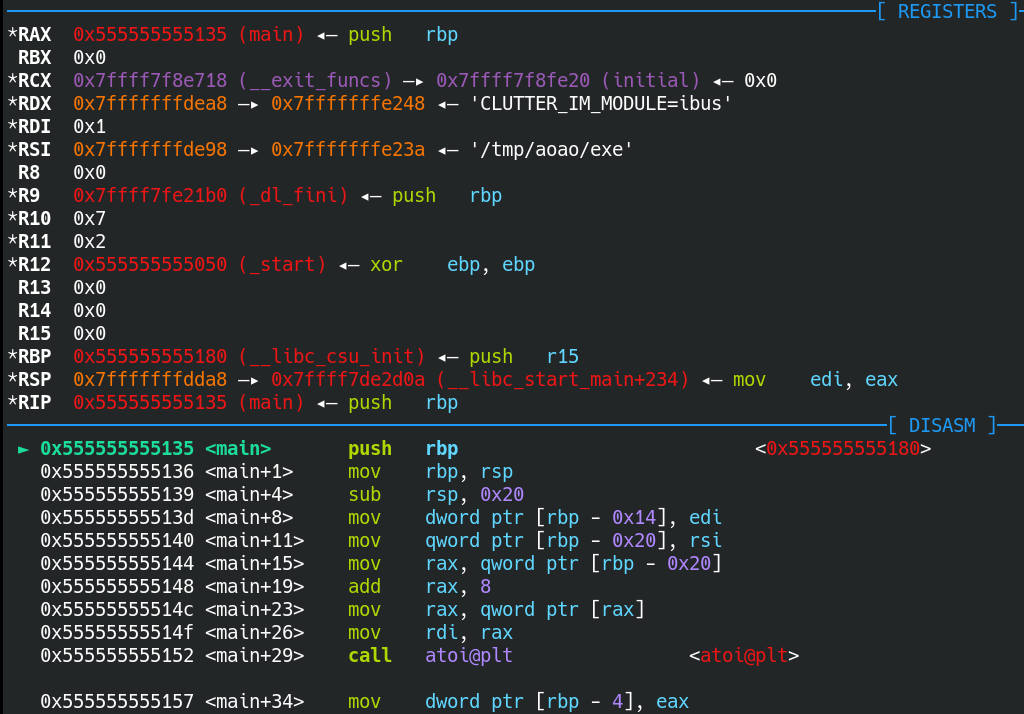
Exemple de l’exécution de la fonction main dans GDB :
Ce type d’analyse permet généralement de confirmer ce qui a été vu en analyse statique ou de comprendre certaines fonctionnalités qui n’ont pas pu être analysées correctement.
Par exemple, les malwares les plus robustes disposent souvent de plusieurs couches d’obfuscation qui ne ralentissent et limitent la compréhension de leur fonctionnement en analyse statique.
Par exemple, certaines fonctions auront un code décompilé illisible. Dans d’autres cas il peut arriver de ne pas du tout pouvoir décompiler le code assembleur du programme.
Ainsi, l’objectif de l’analyse dynamique est de reproduire l’environnement d’exécution du programme étudié afin d’analyser au mieux son comportement à travers l’analyse de son exécution. Il ne s’agit pas seulement d’utiliser un debugger, mais également d’autres outils de monitoring afin d’observer les processus créés, les fichiers modifiés, les évènements déclenchés…
En reverse, on ne choisit pas soit d’utiliser l’analyse statique soit d’utiliser l’analyse dynamique. Au contraire, on préfère généralement combiner les deux et tirer profit des avantages de chacune d’elles.
L’exécution symbolique
L’exécution symbolique est généralement moins connue et moins maîtrisée du grand publique. Afin de comprendre son fonctionnement et son utilité, reprenons le précédent programme :
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
#include "stdlib.h"
int main(int argc, char *argv[])
{
int arg = atoi(argv[1]);
if (arg == 0xdeadbeef)
{
return 1337;
}
else
{
return -1;
}
}
Le fonctionnement du programme est assez trivial : le programme récupère le premier paramètre saisi par l’utilisateur et le compare à 0xdeadbeef.
Si les valeurs sont identiques, la valeur retournée est 1337, sinon c’est -1. A ce stade, l’analyse statique nous permet d’ores et déjà de trouver la bonne valeur à saisir. Essayons tout de même de trouver le bon input afin que la valeur de retour soit 1337 grâce à angr.
Tout d’abord, créez un fichier “exemple_1.c” contenant le précédent programme. Puis compilez le avec la commande : gcc -no-pie exemple_1.c -o exemple_1.
L’option
-no-pieimplique que les instructions du programme sera toujours chargé à la même adresse et ne sera pas (totalement) soumis à l’ASLR. De cette manière angr ne nous demandera pas de lui spécifier une adresse de base, ce qui est plus commode pour nous.
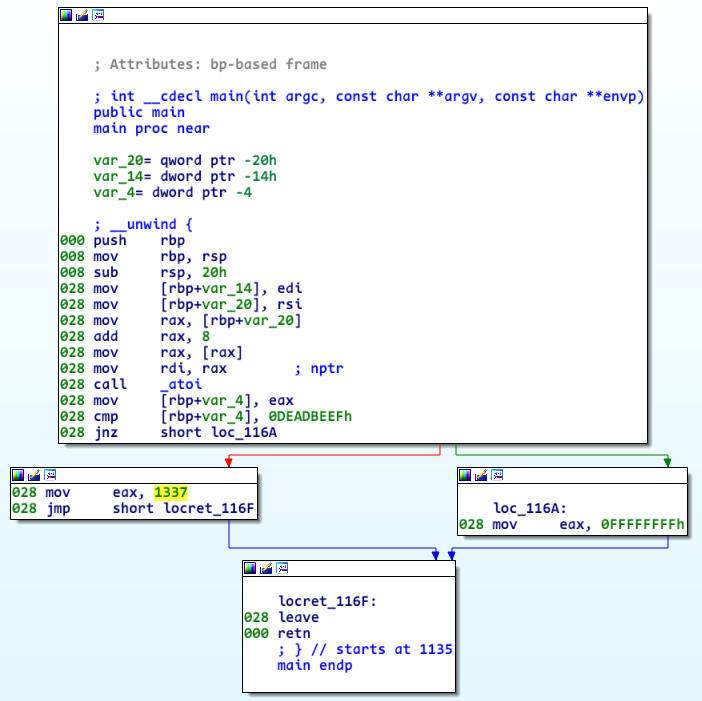
Ouvrons le programme fraîchement compilé exemple_1 avec IDA (IDA Free fera l’affaire ;) ) :

Finalement rien de surprenant, on retrouve bien les deux blocs de code, l’un lorsque la comparaison est réussie (en vert) l’autre lorsque la comparaison échoue (en rouge).
Avant d’aller plus loin, il est nécessaire de se familiariser avec quelques notions cruciales lorsque l’on aborde l’exécution symbolique.
Les états
La notion d’état en exécution symbolique est une notion très importante. En comprenant comment fonctionne la gestion des états, on comprend comment fonctionne l’exécution symbolique. De la même manière, une gestion désastreuse des états limite fortement la puissance que l’on peut tirer de l’exécution symbolique.
Un état en exécution symbolique est le contexte dans lequel est actuellement exécuté le programme. Un contexte est donc totalement déterminé par la valeur qu’ont ses registres et les différentes zones mémoire assignées. Ainsi, deux états sont différents si et seulement si il ont au moins un registre, une zone qui a une valeur différente ou des variables qui ont des contraintes différentes.
Un état est un peu comme ce qui est affiché dans le précédent screenshot de gdb dans la section “Analyse dynamique” avec les différentes valeurs des registres, de la mémoire …
angr subdivise l’état courant quand il rencontre un branchement vers deux chemins différents qui ont chacun leur contrainte. Par exemple, lorsque notre état initial arrivera à l’instruction 0x40114E : jnz 0x401157, deux cas sont possibles :
- Soit
[rbp+var_4] == 0xDEADBEEF - Soit
[rbp+var_4] != 0xDEADBEEF
Il est possible que les adresses utilisées dans ce tutoriel ne soient pas en adéquation avec le programme “exemple_1” si vous l’avez compilé sur votre machine.
Il suffit d’adapter le script en modifiant les différentes adresse à partir des captures d’écran de ce tutoriel pour que cela corresponde aux adresses utilisées par votre programme.
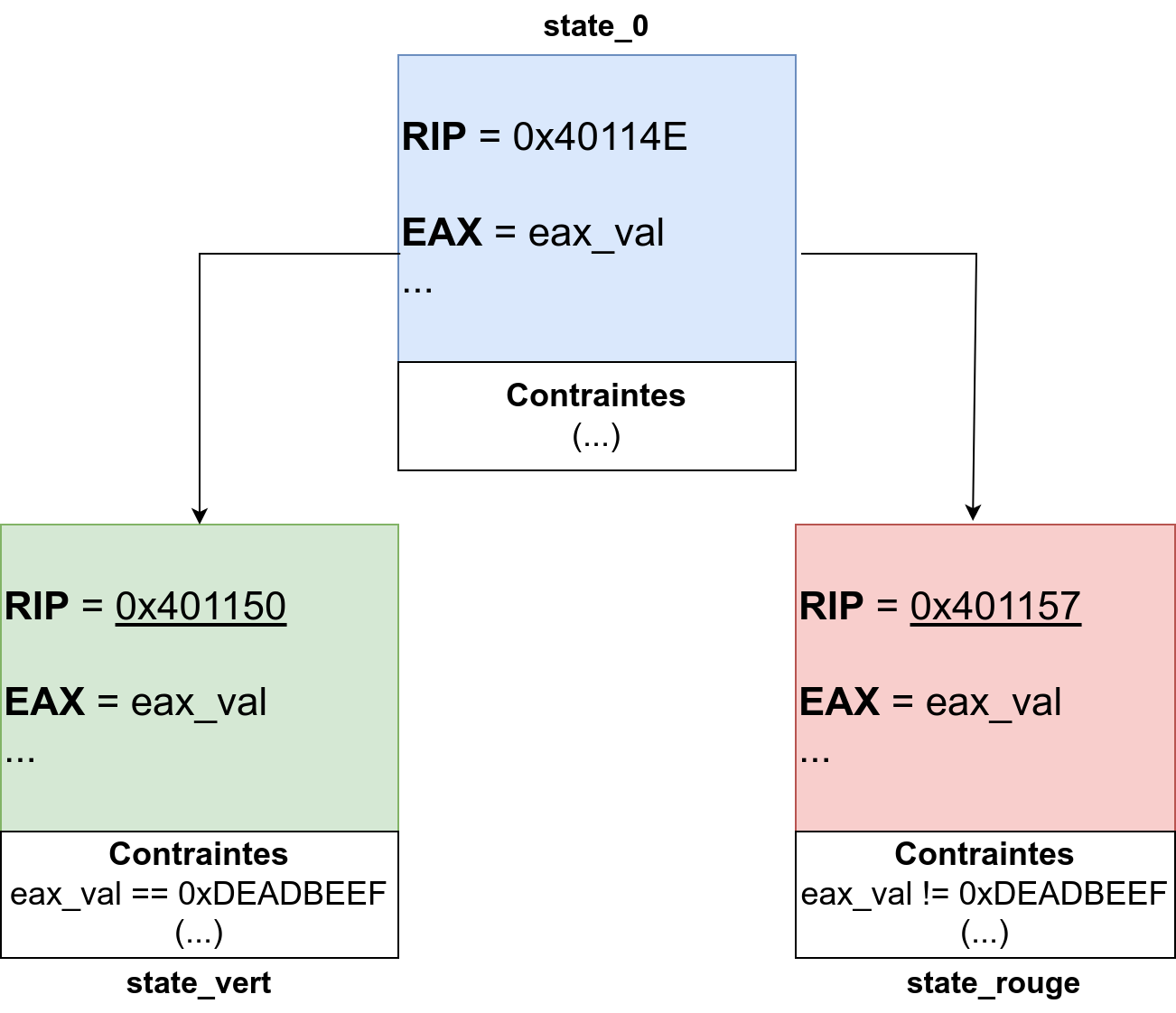
Ainsi, il y a une contrainte sur la valeur contenue à [rbp+var_4] qui est différente en fonction du chemin parcouru. Que va faire angr dans ce cas ? C’est très simple. Il va prendre l’état initial state_0 et réaliser deux “copies” de cet état, nommons les state_vert et state_rouge.
Les deux différences entre state_vert et state_rouge sont les suivantes :
state_vert:- Le registre
RIPvaut0x401150 - L’état a la contrainte :
[rbp+var_4] == 0xDEADBEEF
- Le registre
state_rouge:- Le registre
RIPvaut0x401157 - L’état a la contrainte :
[rbp+var_4] != 0xDEADBEEF
- Le registre
Au-delà de ces deux différences, les autres registres et zones mémoire de ces deux sous-états sont les mêmes. La gestion de plusieurs états simultanément est ce qui fait la force de l’exécution symbolique car cela permet de parcourir bien plus de code qu’avec une simple exécution du programme.
Paradoxalement, la subdivision en plusieurs états est également ce qui fait la faiblesse de l’exécution symbolique : plus il y a de branchements dans un programme, plus il y a d’états à gérer, plus cela consomme de la RAM. Ainsi, dans un programme qui effectue un grand nombre de boucles ou qui contient des boucles dans des boucles, la mémoire vive peut vite saturer et faire planter l’exécution symbolique. Nous ferons par la suite un exemple de programme qui provoque une explosion de chemins.
Voici grossomodo le contenu des trois précédents états :
Mais la contrainte portait sur
[rbp+var_4]pourquoi est-elle maintenant sureax_val?
Certes la contrainte porte sur la valeur contenu à [rbp+var_4], mais quelle variable est à l’origine de [rbp+var_4] ?
Si on regarde quelques instructions plus haut, on voit : 0x401144 : mov [rbp+var_4], eax où eax est la valeur de retour de atoi. Ainsi, mettre une contrainte sur [rbp+var_4] revient à mettre une contrainte sur le contenu de eax à la sortie de atoi que l’on nomme eax_val.
eax_val est une variable symbolique et c’est sur elle que sera établie la contrainte.
Les variables symboliques
Une autre notion importante en exécution symbolique est la notion de variables symboliques. En fait, pour qu’un moteur d’exécution symbolique puisse parcourir plusieurs chemins via plusieurs états simultanément, il faut que certaines variables soient symboliques.
Contrairement aux variables ayant des valeurs concrètes, les variables symboliques peuvent, au départ, avoir n’importe quelle valeur. Ce n’est qu’au fur et à mesure de l’exécution du programme, du choix du chemin lors de branchements if / else que des contraintes seront ajoutées à la variable symbolique.
Imaginons que eax_val ait une valeur concrète au retour de atoi, par exemple 0xcafebabe. Il ne sera pas possible d’imposer des contraintes sur eax_val car la variable a déjà la contrainte suivante eax_val == 0xcafebabe.
Ainsi, initialement, une variable symbolique peut avoir n’importe quelle valeur selon son type.
Par exemple :
- une variable de 8 bits aura une valeur initialement comprise entre 0x00 et 0xff (255)
- une variable de 32 bits aura une valeur initialement comprise entre 0x00 et 0xffffffff (4294967295)
Contraintes d’une variable symbolique
Généralement, une variable symbolique va subir plusieurs contraintes au fil de l’exécution et du chemin emprunté par le moteur d’exécution symbolique. Il existe alors trois cas possibles pour cette variable une fois l’exécution stoppée après avoir suivi un certain chemin :
- Il y a une unique solution : Au vu des contraintes sur la variable, il ne peut y avoir qu’une unique solution valable.
- Il y a plusieurs solutions possibles : Par exemple, le chemin suivi ne peut être parcouru que si la taille de la chaîne de caractères ( qui est une valeur symbolique ) est strictement positive.
- Il n’y a aucune solution possible : Cela peut arriver lorsque plusieurs contraintes ne sont pas satisfaisables en même temps. Par exemple si une des contraintes est
var >= 10et l’autre estvar < 8, il n’existe pas de solution possible.
En fait, angr ne détermine pas tout seul si, au moins une ou plusieurs solutions sont possibles. Il s’aide de ce que l’on appelle un SMT solveur. Il s’agit d’un outil qui prend en entrée un ensemble de formules logiques qui spécifient des contraintes sur des variables et retourne un résultat, si cela est possible.
Ce n’est pas parce qu’un problème est satisfaisable que le solveur retournera facilement une solution. Certaines contraintes sur une variable peuvent être tellement lourdes et complexes que cela prendra des minutes voire des heures avant de trouver un résultat.
Parmi les SMT solveurs les plus connus il y a : Z3, Boolector, Bitwuzla …
Quant à angr, il utilise Z3 en tant que solveur.
Le SMT solveur Z3
Un solveur SMT (Satisfiability Modulo Theories), tel que Z3, est un outil logiciel qui permet de résoudre des problèmes de satisfiabilité. Il est utilisé pour vérifier si une certaine formules logique disposant de combinaisons de contraintes est satisfaisable ou non.
Ce qui est encore plus impressionnant avec un solveur est que, lorsqu’il existe au moins une solution, il arrive souvent à nous retourner une solution. Dans les cas où la formule est vraiment très compliquée et que la machine utilisée n’est pas très puissante, il se peut qu’il y ait un timeout sans trouver de solution.
Prenons un exemple concret dans lequel nous allons demander à z3 de résoudre deux équations :
- Une ayant plusieurs solutions possibles
- Une n’ayant aucune solution
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
from z3 import *
# Création de la variable x
x = Int('x')
# Création de l'équation
equation = x - 7 >= 2
# Création du solveur Z3
solveur = Solver()
# Ajout de l'équation au solveur
solveur.add(equation)
# Résolution du solveur
if solveur.check() == sat:
# Si une solution est trouvée, affiche la valeur de x qui satisfait l'équation
modele = solveur.model()
solution = modele[x]
print("Une solution de l'équation est : x =", solution)
else:
# Si aucune solution n'est trouvée
print("Pas de solution trouvée.")
En exécutant ce script python, une sortie que l’on peut avoir est Une solution de l'équation est : x = 9 qui est bien une solution de l’équation x - 7 >= 2 (où x est un entier).
Maintenant, ajoutons une autre contrainte avec les deux lignes suivantes en dessous de solveur = Solver() :
1
2
equation_2 = x < 0
solveur.add(equation_2)
Les contraintes sur x n’étant pas satisfaisables, l’exécution du script retourne Pas de solution trouvée.. L’idée n’étant pas de savoir utiliser de manière avancée z3 (angr le fera pour nous 🤭 ) mais de comprendre à quoi sert un solveur et comment les utiliser.
Utilisation d’angr
Nous avons parlé des principaux éléments théoriques liés à l’exécution symbolique (variable symbolique, état, contraintes, solveur …). Passons à la partie pratique avec cet exemple.
L’idée globale est de demander à angr d’exécuter la fonction main et de passer par le bloc vert afin qu’il nous donne le bon input pour y arriver.
Voici le début du script qui utilise angr nous permettant de réaliser ça (j’utilise les mêmes adresses que celles que l’on a vu précédemment) :
1
2
3
4
5
6
7
8
9
import angr
p = angr.Project("./exemple_1")
state_0 = p.factory.blank_state(addr= 0x401122)
sm = p.factory.simulation_manager(state_0)
print("[+] Exploration en Cours ....")
sm.explore( find = 0x401150, avoid = 0x401157)
Décortiquons ensemble ce script :
p = angr.Project("./exemple_1")permet de créer un projet “angr” en spécifiant le programme que l’on souhaite utiliserstate_0 = p.factory.blank_state(addr= 0x401122): on crée un état initial “vide” qui démarre à la première instruction dumainà l’adresse0x401122.- Une fois que notre état initial
state_0est créé, il va falloir créer le simulation_manager. Il s’agit d’un objet qui va gérer tous les états lors de l’exécution symbolique. Au départ, il n’y a qu’un seul état, celui que l’on vient de créer. Toutefois, lorsque angr va rencontrer des branchement, par exemple lors d’un “if-else”, il va “subdiviser” l’état courant en deux “sous-états” où chacun prendra respectivement le chemin du “if” et du “else”. - Ensuite, on demande au simulation_manager d’atteindre le bloc “vert” ( la comparaison avec
0xdeadbeefest réussie) en spécifiantfindet d’éviter le bloc en rouge ( la comparaison a échoué) en spécifiantavoid.
Le Simulation Manager
C’est ce gros “truc” qui va gérer tous nos états lors de l’exécution symbolique. A un instant T de l’exécution symbolique, les états peuvent avoir différents statuts :
- active : Un état actif représente un chemin d’exécution en cours d’exploration par angr. Cela signifie qu’angr est en train d’exécuter (symboliquement) des instructions pour ce chemin spécifique ;
- inactive : Un état inactif est un chemin d’exécution qui a été entièrement exploré. Cela peut se produire lorsque toutes les instructions du programme ont été suivies pour ce chemin spécifique ou qu’il s’agit d’une destination atteinte ; angr n’a plus besoin de le considérer ;
- found : Lorsqu’angr atteint un état “found” , cela signifie que le chemin d’exécution satisfait une condition spécifique définie par l’utilisateur. Par exemple, cela peut être le cas lorsque le programme atteint une certaine adresse, quand il atteint une fonction spécifique ou lorsqu’une autre condition définie est satisfaite ;
- avoid : De la même manière qu’un état found signifie qu’on a atteint du code dont le contexte satisfait certaines conditions, un état avoid est un état dans lequel on souhaite que l’exécution du programme soit stoppée ;
- unsat : Un état “unsat” (insatisfaisable) est un chemin d’exécution qui mène à une contradiction ou à une condition impossible à satisfaire. Cela se produit généralement lorsqu’une condition de programme invalide est rencontrée, ce qui signifie qu’angr ne peut pas explorer ce chemin d’exécution plus loin.
Voici un exemple dans lequel le SM (Simulation Manager) contient seulement deux états :
- un état de type found 🟢
- un état de type avoid 🔴

Première exécution du script
On exécute le script avec python3 angr_explore.py et là, et bien rien ! Le script ne semble pas faire grand chose … Vous constaterez qu’angr n’est pas très content et vous le fait savoir via plusieurs warnings. Certains sont anodins (et nous verrons plus tard pourquoi) mais il y en a un qui revient souvent et nous permet de comprendre pourquoi le script ne fait pas grand-chose.
Il s’agit de ce warning :
1
2
WARNING | angr.storage.memory_mixins.default_filler_mixin | Filling memory at 0xfffffffffffffc0b with 1 unconstrained bytes referenced from 0x539
fa0 (atoi+0x0 in libc.so.6 (0x39fa0))
Bon ça a l’air d’être du gros charabia pour nous mais essayons quand même de comprendre la logique dans tout ça. En tout cas, de ce que l’on voit, c’est qu’il semble y avoir un petit soucis à cette adresse : (atoi+0x0 in libc.so.6 (0x39fa0)).
Dès les premières instructions de la fonction atoi, angr est dans les choux. Ce qui est en réalité normal. En effet, atoi est une fonction importée. Elle est donc exécutée dynamiquement par le programme en faisant appel à la bibliothèque standard libc.
Comme angr n’exécute rien dynamiquement, il ne charge même pas la libc au démarrage de l’application. Nous allons donc devoir gérer l’appel à atoi afin de ne plus être embêté par la suite.
En réalité angr gère plutôt bien certaines fonctions de base de la libc. Mais il vaut mieux parfois prendre les rênes afin de savoir exactement ce qui est réalisé.
Ajout d’un hook
Il existe différentes manières de gérer soi-même ou de contourner l’appel à une fonction (ou une instruction de manière générale). La plus simple est l’utilisation de hooks, c’est celle que nous allons utiliser. Il existe une autre manière plus avancée de faire des hooks via SimProcedure (cf les SimProcedures).
Voici comment implémenter un hook dans angr :
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
import angr
def hook_atoi(state):
# Faire des trucs
return
p = angr.Project("./exemple_1")
# Ne pas oublier d'adapter en fonction de vos adresses
state_0 = p.factory.blank_state(addr= 0x401122)
sm = p.factory.simulation_manager(state_0)
p.hook(0x40113f, hook_atoi,5)
print("[+] Exploration en Cours ....")
sm.explore( find = 0x401150, avoid = 0x401157)
Cela se déroule en deux étapes :
- Appeler la fonction
hookde angr sur le projet avec trois arguments :- L’adresse de l’instruction dont on veut intercepter ou modifier le fonctionnement
- la fonction python qui sera exécutée à la place
- la taille totale de l’instruction (ou des instructions) à hook, ici, 5 octets :

- Définir la fonction qui sera appelée lors du hook. En fonction des instructions ou fonctions hookées, son contenu ne sera pas le même. Par exemple, si on hook la fonction
printf, la fonction de hook pourrait simplement afficher une chaîne de caractères à l’écran avecprinten python.

Dans le code exécuté, angr va agir de la sorte :
- En arrivant à l’adresse
0x40113f, il se rend compte que 5 octets à partir de cette adresse doivent être hookés et qu’ils seront donc gérés par notre script. Cela correspond exactement à l’instructioncall _atoi - Le hook Python
hook_atoiest alors exécuté au lieu de l’instruction - Une fois la fonction
hook_atoiterminée, angr reprend l’exécution symbolique à partir de 5 octets plus loin
Ce qui est intéressant avec les fonctions de hook est qu’elles peuvent disposer, en paramètre, de l’état (ici state) courant lorsque le hook a été déclenché. Cela est énormément pratique pour consulter la valeur des registres, les modifier, inspecter la mémoire, la stack etc.
Pour l’instant, la fonction de hook est vide, elle ne fait rien. Remplissons-là ✏️!
On sait que la fonction atoi convertit une chaîne de caractères en un entier. Ce que l’on aurait pu faire pour garder le même fonctionnement de atoi est d’utiliser la variable argv de Python pour retourner un entier arbitraire, choisi au moment du lancement du script.
Mais ce n’est pas ce que nous allons faire. Rappelons nous de l’objectif que nous souhaitons atteindre grâce à l’exécution symbolique : Trouver le bon argument à donner au programme pour qu’il retourne 1337.
Utilisation d’une variable symbolique
Ainsi notre argument argv[1] ne doit pas être concret mais symbolique. Nous devons mettre la valeur de retour dans le registre rax étant donné que c’est le registre qui contient la valeur retournée par une fonction en x86_64.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
import angr
import claripy
# Variable symbolique de 64 bits
arg_symb = claripy.BVS('argv', 8*8)
def hook_atoi(state):
print("[i] La fonction atoi a été hookée")
# On retourne la variable symbolique via rax
state.regs.rax = arg_symb
p = angr.Project("./exemple_1")
state_0 = p.factory.blank_state(addr= 0x401122)
sm = p.factory.simulation_manager(state_0)
p.hook(0x40113f, hook_atoi,5)
print("[+] Exploration en Cours ....")
sm.explore( find = 0x401150, avoid = 0x401157)
print("[+] Arrivé à destination")
print("[+] Chemins explorés : ",sm)
En exécutant cette version du script, on obtient après quelques warnings :
1
2
3
[i] La fonction atoi a été hookée
[+] Arrivé à destination
[+] Chemins explorés : <SimulationManager with 1 found, 1 avoid>
Tout s’est bien passé comme prévu et angr a pu parcourir deux chemins au total :
foundqui regroupe les états issus des chemins parcourus qui ont pu atteindre l’objectif fixé, ici :0x401150(il peut y avoir plusieursfound, dans notre cas, il n’y en a qu’un)avoidqui regroupe les états issus des chemins parcourus et qui doivent s’arrêter s’ils rencontrent une adresse de typeavoid, ici :0x401157(dans notre cas, il n’y en a qu’un)
Voyons ensemble quelques explications quant à la variable symbolique arg_symb. Tout d’abord nous avons importé le module claripy qui est un module qu’utilise angr pour gérer les variables symboliques et concrètes ainsi que l’utilisation du solveur z3.
Les deux types de variables peuvent être déclarés de cette manière :
- Les variables concrètes (ex :
var = claripy.BVV(0xdeadbeef, 8*4)) : pour déclarer une variable concrète, deux arguments sont à renseigner :- Sa valeur
- Sa taille ( en bits ! et non en octets, attention ! ), dans cet exemple, la variable est de 32 bits ( 4 octets )
- Les variables symboliques (ex :
var_symb = claripy.BVS('x', 8)): pour déclarer une variable symbolique, deux arguments sont également à renseigner :- Le nom de la variable symbolique
- Sa taille (ici 1 octet, utile pour représenter, par exemple, une variable de type
char)
J’insiste : la taille spécifiée lors de la création de variables symboliques
BVSou concrètesBVVavec claripy est en BITS !
Ici la variable symbolique que nous utilisons est désignée par arg_symb ( ou argv du point de vue de claripy) et elle a une taille de 8 octets (64 bits). Nous l’utilisons lors du hook de atoi afin de la retourner ( via rax).
Désormais, angr sait que la valeur de retour est symbolique, la comparaison avec 0xdeadbeef peut ainsi échouer ou réussir ici :

Si on voulait optimiser le script, on aurait pu seulement retourner une valeur de 32 bits via
eaxétant donné que seule les 4 premiers octets deraxsont utilisés pour la comparaison.
Mais attends, tu nous as pas dit pourquoi il y a un 36000 mille messages de warning 😵💫?
En fait les différents warnings que l’on a pas traités concernent des zones mémoire que nous n’avons pas initialisées et qui sont manipulées par le programme. Par exemple, les premières instructions de la fonction main sont :
1
2
0000000000401122 push rbp
0000000000401123 mov rbp, rsp
Ainsi, dès la première instruction, angr (qui exécute symboliquement les instructions) doit effectuer push rbp.
Ainsi, deux choses sont à réaliser :
- Récupérer la valeur de
rbp - La mettre sur la stack
Le soucis est qu’angr ne sait pas ce que vaut rbp ni à quelle zone mémoire est la stack. En effet, nous n’avons spécifié aucune de ces valeurs, elles sont donc considérées comme non contraintes par défaut !
Ce que fait angr en nous affichant un message de ce type :
1
WARNING | Filling register rbp with 8 unconstrained bytes referenced from 0x401122 (main+0x0 in exemple_1 (0x401122))
est qu’il “remplit” rbp avec des valeurs sans contraintes afin qu’il puisse “exécuter” l’instruction push rbp en ayant une valeur (quelconque) à mettre dans la stack. Idem pour l’adresse de la stack.
Si on voulait absolument donner une valeur à rsp et rbp, on pourrait faire quelque chose de la sorte :
1
2
3
state_0 = p.factory.blank_state(addr= 0x401122)
state_0.regs.rsp = 0x7fffff0000
state_0.regs.rbp = 0x7fffff0008
Cela peut être utile lorsque l’on veut absolument avoir les mêmes adresses mémoire que celles qui sont affichées par un debugger lorsque l’on réalise une analyse / exécution dynamique.
Récupération de l’entrée valide
On a pu faire en sorte qu’angr atteigne l’adresse du bloc où la comparaison est réalisée correctement. Néanmoins, angr ne nous as pas dit avec quelle entrée valide il a pu en arriver là. Je vous rassure, on y est presque 😅!
Pour rappel, le simulation manager sm a pu avoir au moins un état found. Il suffit désormais de :
- se placer (ou switcher) dans le contexte de l’état qui est arrivé dans le bloc “en vert” ( il s’agit du seul état présent dans
sm.found) - faire appel au solveur afin qu’il nous retourne une valeur de
arg_symbqui a permis à cet état d’arriver dans le bloc qui nous intéresse - afficher ladite valeur !
Voici le script final :
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
import angr
import claripy
# Variable symbolique de 64 bits
arg_symb = claripy.BVS('argv[1]', 8*8)
def hook_atoi(state):
print("[i] La fonction atoi a été hookée")
# On retourne la variable symbolique via rax
state.regs.rax = arg_symb
p = angr.Project("./exemple_1")
state_0 = p.factory.blank_state(addr= 0x401122)
sm = p.factory.simulation_manager(state_0)
p.hook(0x40113f, hook_atoi,5)
print("[+] Exploration en Cours ....")
sm.explore( find = 0x401150, avoid = 0x401157)
print("[+] Arrivé à destination")
if len(sm.found) == 0:
print("[-] Il n'a pas été possible d'atteindre la destination")
quit()
else :
print("[+] Détermination de l'input valide")
# Récupération de l'état qui est arrivé dans le bon bloc
found = sm.found[0]
# Appel au solveur pour retourner au moins une solution
res = found.solver.eval(arg_symb)
print("[+] Le bon input est : ",hex(res))
En exécutant ce script, on obtient bien le bon input !
1
2
3
4
5
[+] Exploration en Cours ....
[i] La fonction atoi a été hookée
[+] Arrivé à destination
[+] Détermination de l'input valide
[+] Le bon input est : 0xdeadbeef
Maintenant, passons à l’explication des différentes étapes :
- Tout d’abord, on vérifie qu’il y a au moins un état qui est arrivé à destination (bloc vert), sinon, on quitte
- Si tout est ok, on récupère le premier état de type
found(ici il n’y en a qu’un mais parfois il peut y en avoir plusieurs) - On appelle le solveur de notre état
foundviafound.solver.eval. Les deux paramètres possibles sont :- La variable symbolique dont on veut au moins une valeur possible
- Le format du résultat final (facultatif), par exemple :
cast_to=bytesafin d’avoir des bytes en sortie. En ce qui nous concerne, un entier fera l’affaire.
- Affichage du bon input
Comment le solveur arrive-t-il à trouver le bon input ?
Etant donné que nous avons vu comment, globalement, fonctionne un solveur, il va être plus simple de comprendre comment angr réussit à trouver le bon input.
Tout d’abord, rappelez vous, nous avons déclaré la variable symbolique représentant l’input de cette manière : arg_symb = claripy.BVS('argv[1]', 8*8). A ce stade arg_symb ne dispose d’aucune contrainte et peut donc valoir n’importe quelle valeur de 64 bits.
Toutefois, lors de l’exécution du programme, cette variable symbolique va être soumise à une ou plusieurs contraintes qui seront automatiquement ajoutées par angr.
Par exemple, lors du retour de atoi, le registre rax contient notre variable symbolique arg_symb. Or une comparaison est immédiatement réalisée ensuite :
Ainsi, pour que l’instruction jnz ne soit pas exécutée et que l’on aille directement dans le bloc “vert”, il est nécessaire que la condition suivante soit vérifiée : eax == 0xdeadbeef. Or eax contient les 32 bits de poids faible de arg_symb.
De cette manière, angr ajoute automatiquement une contrainte du type arg_symb[32:64] == 0xdeadbeef.
Comme la comparaison est effectuée sur 32 bits via
eax, il n’y a aucune contrainte sur les 32 bits de poids fort derax.
S’exercer
Voici un petit programme assez simple qui prend un chaîne de caractère hexadécimale et vérifie s’il s’agit de la bonne clé.
Quelques différences avec le programme que nous avons étudié sont à noter :
- L’input n’est plus récupérée via
argv - Plusieurs fonctions de la libc ont été ajoutées ( les hooker ?)
L’objectif n’est pas de devenir un pro de angr avec ce challenge mais de savoir utiliser les fonctionnalités de base de angr.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
#include "stdio.h"
#include "stdlib.h"
#include "string.h"
unsigned long long hash(unsigned long long arg)
{
unsigned long long result = 0;
unsigned char x =0;
unsigned long long temp =0;
unsigned long long key =0xef9e8bd8f3afe9eb;
for (int i =0;i<8;i++)
{
x = (arg >> (i*8)) &0xff;
switch(x % 2)
{
case 0:
temp = 0xff;
break;
case 1:
temp = x ^ (unsigned char)((key >> (i*8)) &0xff);
break;
}
result = result | (temp << (i*8));
}
return result;
}
int main()
{
char key_buffer[16] = {0};
puts("Give me the key in hexadecimal : ");
read(0,key_buffer,16);
unsigned long long arg = strtoull(key_buffer,NULL,16);
if (hash(arg) == 0xdeadbeefcafebabe)
{
puts("Win !");
return 1337;
}
else
{
puts("Loose !");
return -1;
}
}
Pour le compiler : gcc -no-pie main.c -o exe.
Résumé
Nous avons pu voir ensemble au cours de ce chapitre plusieurs points :
- Rappel sur ce qu’est l’analyse statique et l’analyse symbolique
- Les états sont des contextes d’exécution symbolique qui permettent de pouvoir parcourir plusieurs chemin lors d’une même exécution (symbolique). Les états diffèrent principalement par les contraintes appliquées à leurs variables
- Les contraintes permettent de restreindre la valeur que peut avoir une variable symbolique
- Le SMT solveur permet de prouver qu’une équation dispose d’une solution, plusieurs ou aucune. Ces équations sont réalisées à partir des contraintes sur les variables