Partie 18 - Le user land et kernel land
Le user land et kernel land
Vous vous êtes toujours demandé la différence entre le noyau de votre OS, un programme lambda et un pilote ?
Ça tombe bien ! Nous allons tenter de comprendre comment interagissent ces différents composant d’un système d’exploitation. L’idée est que vous puissiez avoir une vision globale de l’interaction entre le user land et kernel land sans pour autant entrer dans les détails du kernel land.
D’ailleurs, vous le saviez, vous, que le kernel Linux était un fichier ELF et que le kernel Windows était un fichier PE 😲 ?
Sous linux, le kernel se trouve ici :
/boot/vmlinuz-$(uname -r). Vous pouvez suivre les étapes indiquées ici afin de constater par vous-même que le kernel n’est finalement qu’un fichier ELF 🙃.
Sous Windows, le kernel est normalement présent ici :
C:\Windows\System32\ntoskrnl.exe.
Les appels système (ou syscalls)
Nous n’allons pas nous attarder sur le kernel land en termes de reverse car il est nécessaire d’être très à l’aise en rétro-ingénierie et d’avoir des connaissances avancées concernant le fonctionnement su kernel land et ce n’est pas forcément un chapitre qu’il convient d’entamer dans un cours d’introduction au reverse.
Néanmoins, il y a une fonctionnalité que vous risquez de rencontrer et qui est à la limite du user land et du kernel land : les appels système (ou syscalls).
Derrière ce nom alambiqué se cache une solution à une problématique relativement simple.
La problématique
Voici comment on pourrait représenter la mémoire du PC à un instant T (sous Linux mais sous Windows le principe et plus ou moins le même) :
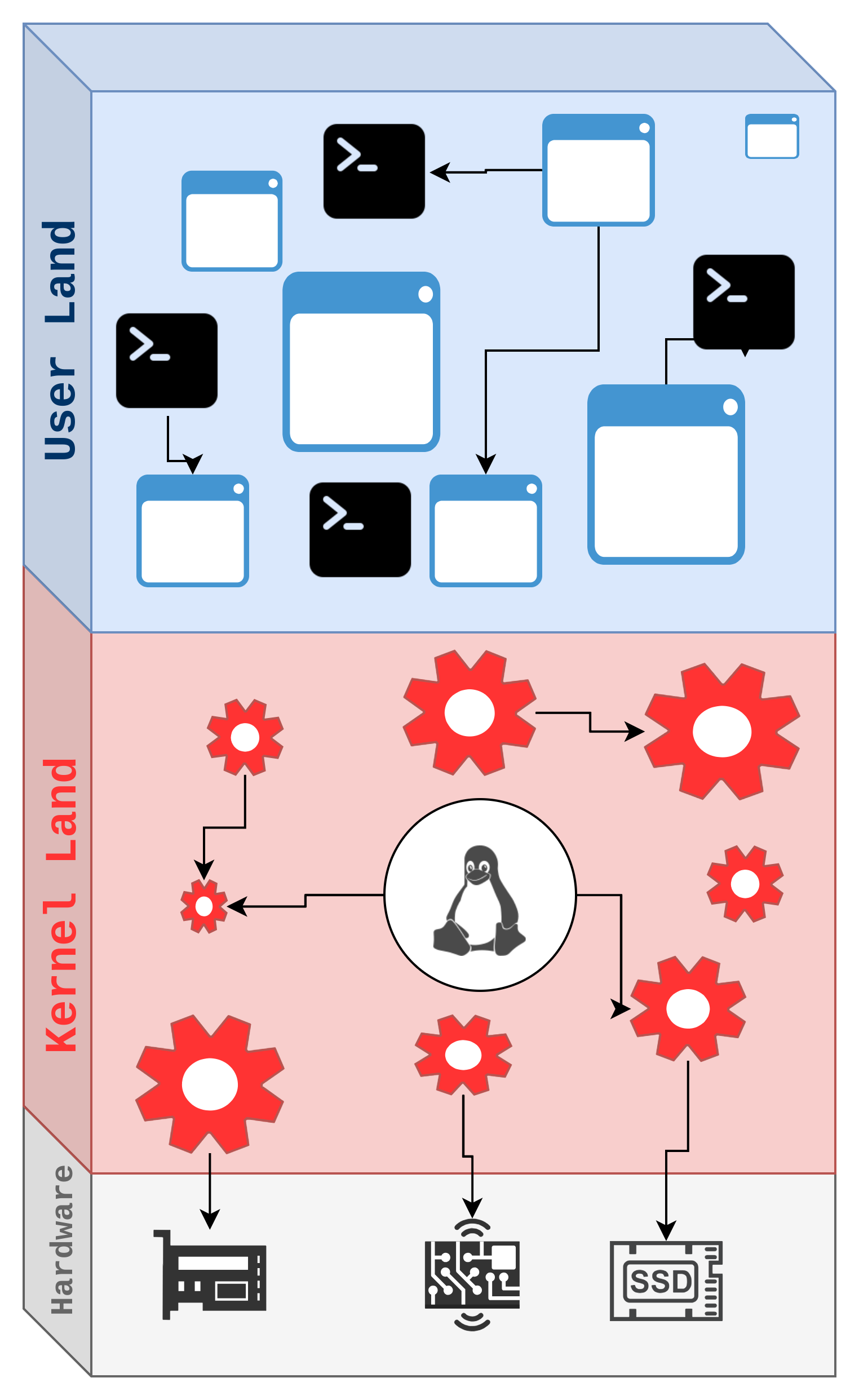
Nous pouvons distinguer 3 parties :
- Le user land : c’est la partie visible de l’iceberg, celle à laquelle on est confrontés tous les jours : navigateur, terminal, programme compilé, serveur web et j’en passe.
- Le hardware : il s’agit du matériel et périphérique que l’on branche à un ordinateur, qui peuvent être essentiels (RAM, Disque dur / SSD …) ou non (imprimante, carte graphique dédiée, souris, clavier, ethernet …).
- Le kernel land : l’accès au matériel et périphériques étant beaucoup trop sensible ( exemple : risque de sabotage du Disque dur si mal utilisé), il n’est pas possible de laisser n’importe quel programme en user land y accéder. Il faut donc que des programmes bien spécifiques, appelés pilotes, modules ou drivers opèrent ce délicat travail . Le kernel land contient le kernel (noyau, merci Sherlock 🕵️♂️) de l’OS. Le noyau est chargé de faire un tas de choses dont : l’ordonnancement, la gestion de la mémoire physique et virtuelle …
Ok je comprends bien, donc les pilotes gèrent les accès au hardware afin que tout se passe bien, jusque-là, c’est ok.
Mais comment fait un programme en user land, par exemple mon navigateur, pour se connecter à internet s’il n’a pas directement accès à la carte réseau WiFi / Ethernet 🤔 ?
C’est justement LA problématique susmentionnée à laquelle les appels système vont nous permettre de répondre : comment interagir avec des composants ou fonctionnalité bas niveau à partir du user land ?
Un appel système, comment ça marche ?
Premièrement voici une manière de représenter l’utilité des appels système dans le précédent schéma :
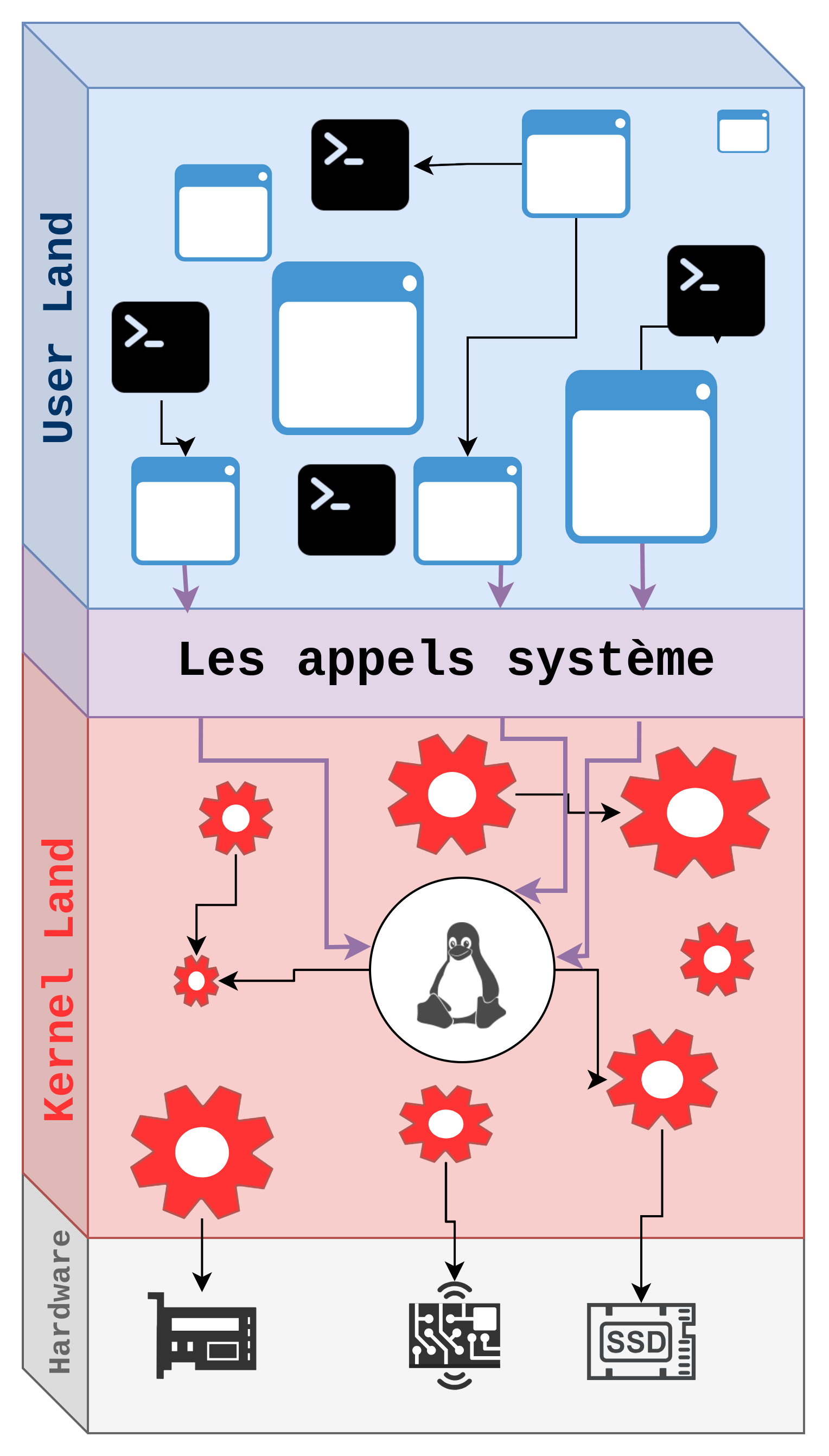
Les appels systèmes vont jouer le rôle d’interface entre le user land et le kernel land.
Les syscalls sont des fonctions prédéfinies présentes dans le kernel lui même. La liste des syscalls (sous Linux) est disponible dans le fichier include/linux/syscalls.h.
Si on y jette un œil, au vu des noms de fonctions qui sont assez explicites, on constate qu’il y a des fonctions de gestion de fichiers (sys_read, sys_write, sys_open, sys_close … ) de gestion de mémoire (sys_mmap, sys_mprotect, sys_munmap …) et bien d’autres.
Par abus de langage, on parle souvent de syscall
readpour parler desys_read,writepoursys_writeetc.
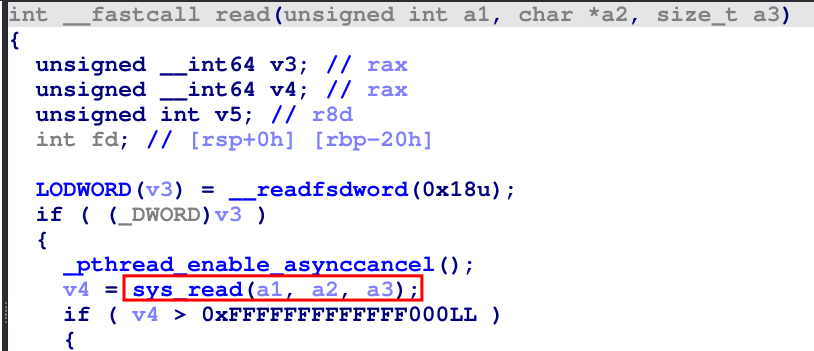
Vous remarquerez que beaucoup de ces noms de fonctions ressemblent tout simplement à des fonctions de la libc (read, write, mmap …). D’ailleurs, les fonctions associées dans la libc ne sont “que” des surcouches (wrappers) aux appels système idoines.
Quoi ? Vous ne me croyez pas 😞 ? Alors voici un exemple avec la fonction read :
1
2
3
4
5
6
7
8
9
10
#include <unistd.h>
#include <stdio.h>
int main()
{
char buff[20];
read(0,buff,10);
return 1;
}
Compilons-le en statique afin de pouvoir voir le contenu de read … en analyse statique : gcc -static main.c -o exe.
Si vous ouvrez le programme dans IDA et allez dans read, vous verrez cela :
En assembleur, le syscall est réalisé avec l’instruction syscall (merci Sherlock 🕵️♂️) :

En fait, l’instruction
syscalln’est disponible qu’en x86_64. Ainsi, pour réaliser un appel système en x86, c’est plutôt l’instruction (plus précisément, interruption)int 0x80qui est utilisée.
Il y a une convention d’appel à respecter lorsque l’on souhaite réaliser un appel système. Par exemple mettre le numéro du syscall dans
eax/rax. Néanmoins, comme nous n’allons pas nous attaquer au reverse kernel land, il n’est pas nécessaire de nous y attarder.
Convaincus maintenant 😏 ?
En somme, un appel système est une fonction prédéfinie du kernel que l’on peut appeler depuis le user land. Le kernel se débrouille ensuite pour utiliser les bons modules/pilotes afin de satisfaire la demande (lecture de l’entrée standard, allocation de mémoire, écriture dans un fichier …).
Si vous souhaitez comprendre davantage le fonctionnement des appels système, cet article est fait pour vous. Il est rédigé en anglais mais permet de comprendre les aspects techniques sous-jacents lors d’un syscall.
Dans le précédent schéma, tous les syscall finissent dans le kernel. N’est-il pas possible d’interagir aussi avec les différents pilotes en kernel land ?
Il est effectivement possible d’interagir avec des drivers avec un appel système bien précis sous Linux : ioctl (et DeviceIoControl sous Windows).
L’explication et le fonctionnement de ce syscall sortent du cadre de ce cours et puis, de toute manière, on ne le voit pas très souvent quand on débute en reverse, sauf éventuellement dans des programmes qui nécessitent d’échanger des données avec certains pilotes. Cela peut être le cas, par exemple, des programmes système.
Si vous êtes également intéressés au sujet de la gestion des interruptions, voici un petit résumé qui en parle : les interruptions.